Learning for Intelligent Robotic Agents
Welcome to LiRA, where we focus on developing embodied AI agents. Unlike traditional passive AI systems, we specialize in crafting active AI agents capable of understanding and dynamically interacting with the physical world, much like humans do. Our goal extends to the seamless coexistence and collaboration between humans and robots, envisioning a future where these entities work harmoniously together. Drawing from an interdisciplinary toolkit, our research leverages methodologies from reinforcement learning, machine learning, deep learning, optimization, and probabilistic inference.
news
| Sep 22, 2025 | Asst. Prof. Özgür S. Öğüz was one of the speakers at the ROMER-3R Robotic Research Retreat held at ODTÜ (METU) on September 22, 2025. |
|---|---|
| Jun 15, 2024 | Our preprint (on Deep Reinforcement Learning) is out CUER: Corrected Uniform Experience Replay for Off-Policy Continuous Deep Reinforcement Learning Algorithms - [pdf]. |
selected publications
-
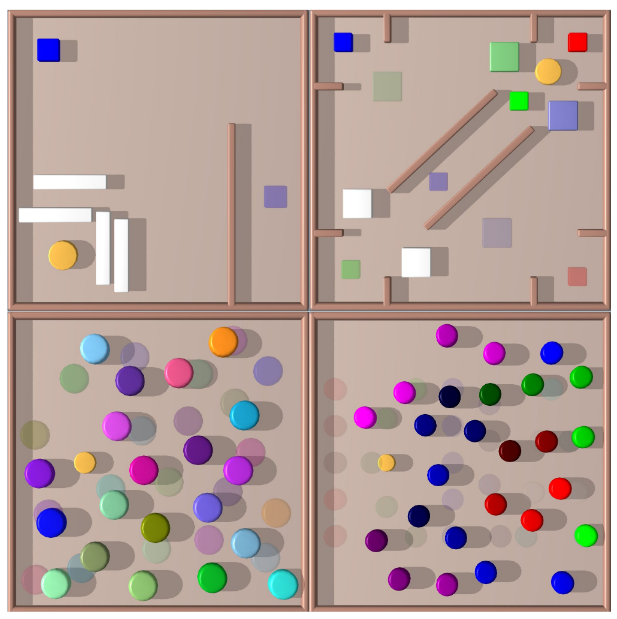 MO-SeGMan: Rearrangement Planning Framework for Multi Objective Sequential and Guided Manipulation in Constrained EnvironmentsarXiv preprint arXiv:2511.01476, 2025
MO-SeGMan: Rearrangement Planning Framework for Multi Objective Sequential and Guided Manipulation in Constrained EnvironmentsarXiv preprint arXiv:2511.01476, 2025 -
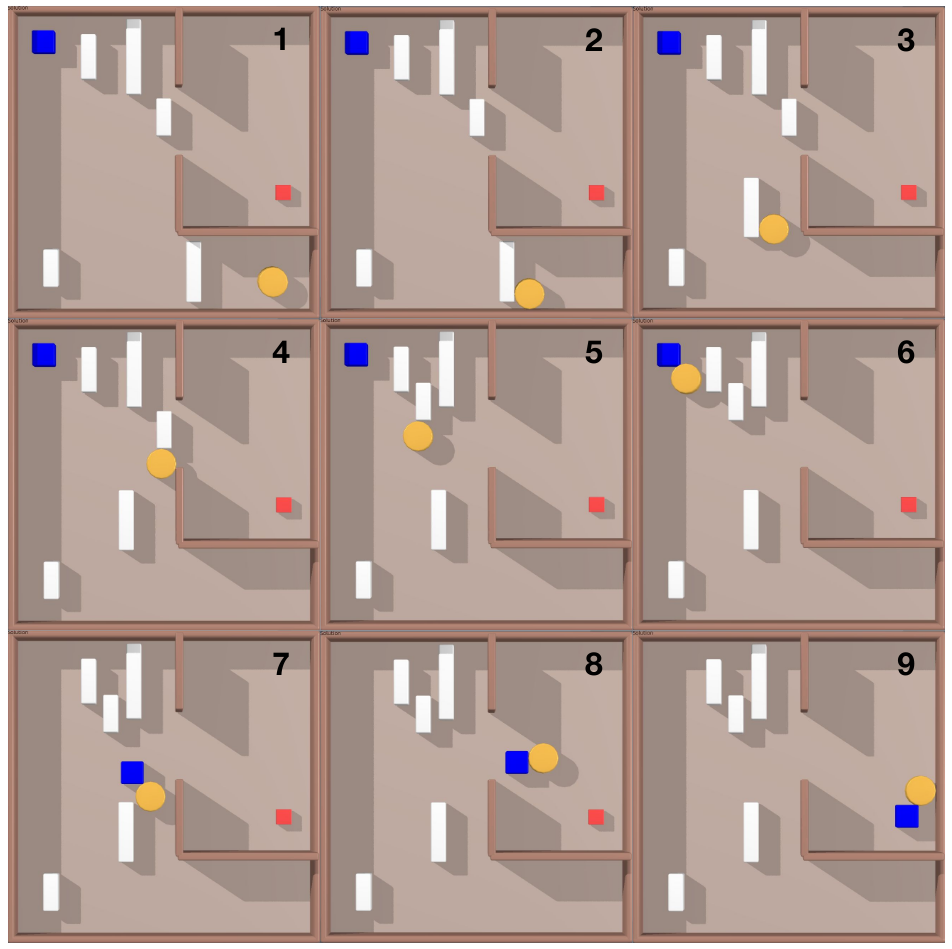 SeGMan: Sequential and Guided Manipulation Planner for Robust Planning in 2D Constrained Environments2025
SeGMan: Sequential and Guided Manipulation Planner for Robust Planning in 2D Constrained Environments2025 -
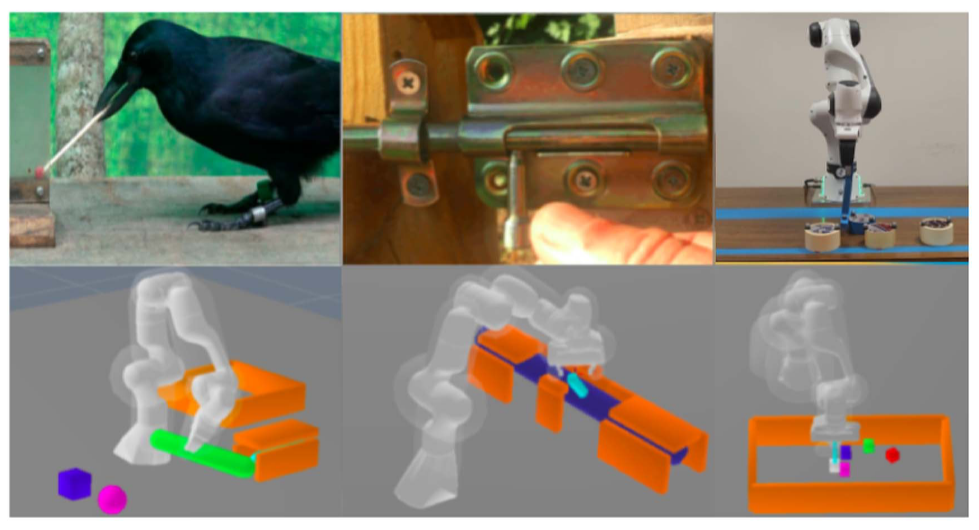
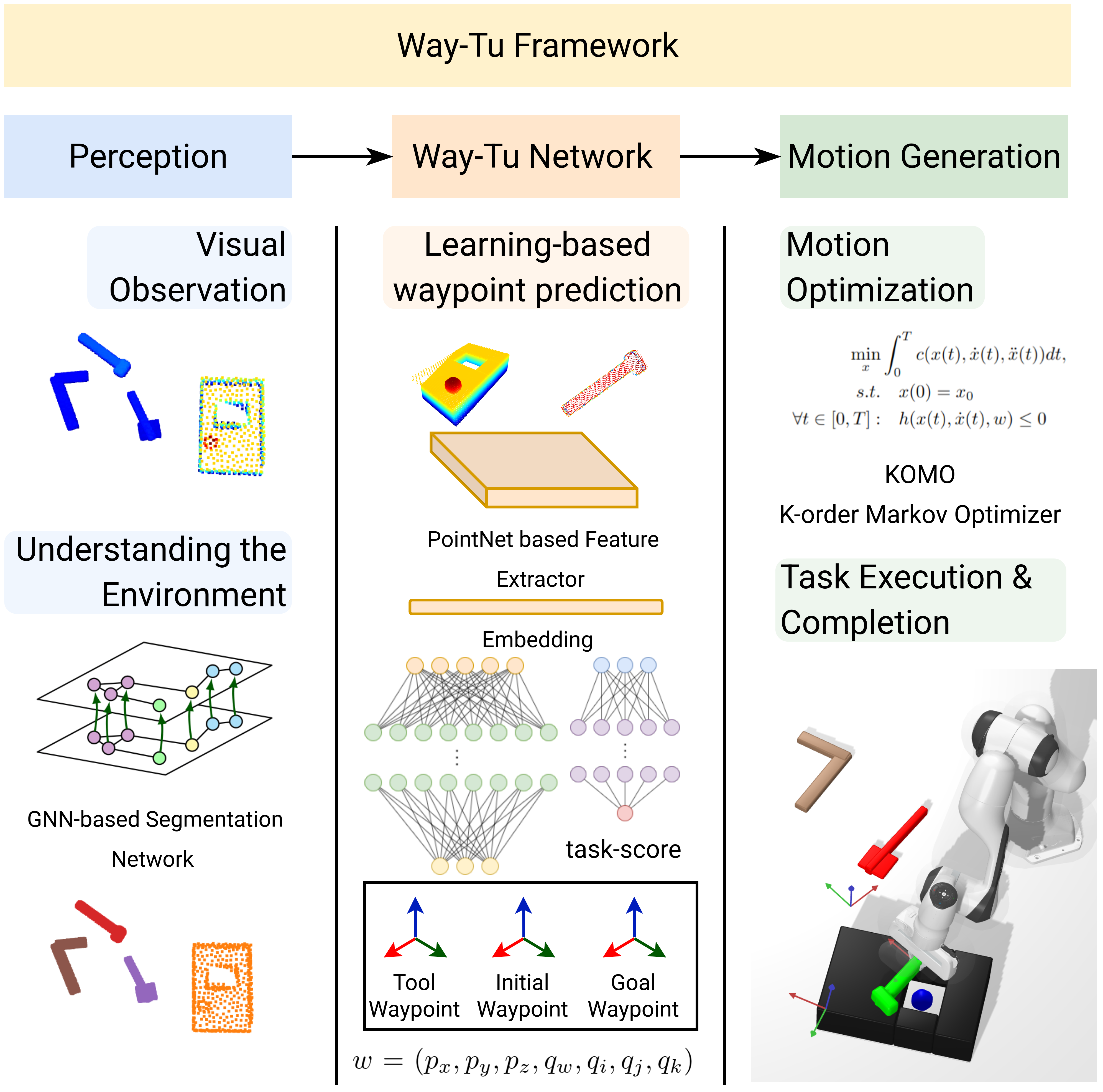 Way-Tu: A Framework for Tool Selection and Manipulation Using Waypoint RepresentationsIn Dexterous Manipulation: Learning and Control with Diverse Modalities , 2025
Way-Tu: A Framework for Tool Selection and Manipulation Using Waypoint RepresentationsIn Dexterous Manipulation: Learning and Control with Diverse Modalities , 2025 -
 H-MaP: An Iterative and Hybrid Sequential Manipulation PlannerIEEE Robotics and Automation Letters, 2025
H-MaP: An Iterative and Hybrid Sequential Manipulation PlannerIEEE Robotics and Automation Letters, 2025





Bilkent University
Department of Computer Engineering
Cankaya 06800 Ankara