Welcome to LiRA, where we focus on developing embodied AI agents. Unlike traditional passive AI systems, we specialize in crafting active AI agents capable of understanding and dynamically interacting with the physical world, much like humans do. Our goal extends to the seamless coexistence and collaboration between humans and robots, envisioning a future where these entities work harmoniously together. Drawing from an interdisciplinary toolkit, our research leverages methodologies from reinforcement learning, machine learning, deep learning, optimization, and probabilistic inference.
@article{25-tuncer2025-Arxiv,title={CoRAL: Contact-Rich Adaptive LLM-based Control for Robotic Manipulation},author={Berk Cicek, Mert K. Er, Ozgur S. Oguz},journal={RSS 2026 Robotics: Science and Systems 2026},year={2026},}
Lagrangian Perturbation Diffusion Steering: Latent Reinforcement Learning for Generative Policies
Hikmet Simsir ⋅ Ozgur S. Oguz
ICML 2026 Forty-Third International Conference on Machine Learning, 2026
@article{25-tuncer2025-Arxix,title={MO-SeGMan: Rearrangement Planning Framework for Multi Objective Sequential and Guided Manipulation in Constrained Environments},author={Tuncer, Cankut Bora and Toussaint, Marc and Oguz, Ozgur S},journal={arXiv preprint arXiv:2511.01476},year={2025},}
SeGMan: Sequential and Guided Manipulation Planner for Robust Planning in 2D Constrained Environments
Cankut Bora Tuncer , Dilruba Sultan Haliloglu , and Ozgur S Oguz
@article{25-tuncer-IROS,title={SeGMan: Sequential and Guided Manipulation Planner for Robust Planning in 2D Constrained Environments},author={Tuncer, Cankut Bora and Haliloglu, Dilruba Sultan and Oguz, Ozgur S},booktitle={2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},year={2025},organization={IEEE},}
Way-Tu: A Framework for Tool Selection and Manipulation Using Waypoint Representations
Ece Kunduracioglu , and Ozgur S Oguz
In Dexterous Manipulation: Learning and Control with Diverse Modalities , 2025
@inproceedings{25-kunduracioglu-CoRLWorkshop,title={Way-Tu: A Framework for Tool Selection and Manipulation Using Waypoint Representations},year={2025},author={Kunduracioglu, Ece and Oguz, Ozgur S},booktitle={Dexterous Manipulation: Learning and Control with Diverse Modalities},}
H-MaP: An Iterative and Hybrid Sequential Manipulation Planner
Berk Cicek , Arda Sarp Yenicesu , Cankut Bora Tuncer , and 2 more authors
@article{25-cicek-RA-L,title={H-MaP: An Iterative and Hybrid Sequential Manipulation Planner},author={Cicek, Berk and Yenicesu, Arda Sarp and Tuncer, Cankut Bora and Demiray, Kutay and Oguz, Ozgur S},journal={IEEE Robotics and Automation Letters},year={2025},publisher={IEEE},}
CUER: Corrected Uniform Experience Replay for Off-Policy Continuous Deep Reinforcement Learning Algorithms
Arda Sarp Yenicesu , Furkan B. Mutlu , Suleyman S. Kozat , and 1 more author
@misc{24-yenicesu-Arxiv,title={CUER: Corrected Uniform Experience Replay for Off-Policy Continuous Deep Reinforcement Learning Algorithms},author={Yenicesu, Arda Sarp and Mutlu, Furkan B. and Kozat, Suleyman S. and Oguz, Ozgur S.},year={2024},}
Bilkent University Department of Computer Engineering Cankaya 06800 Ankara
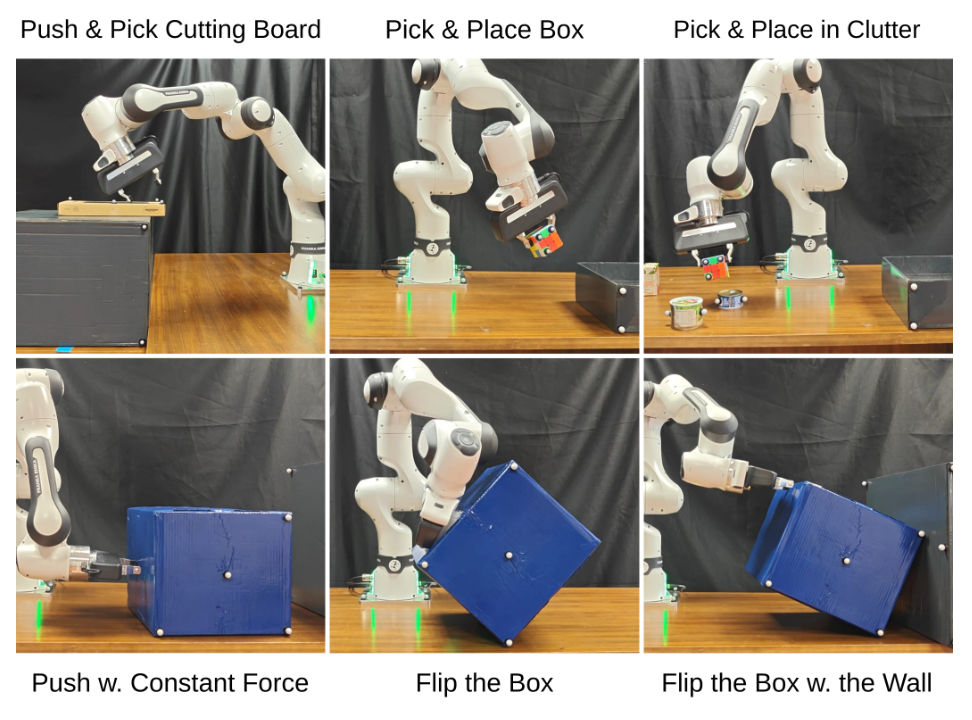 CoRAL: Contact-Rich Adaptive LLM-based Control for Robotic ManipulationRSS 2026 Robotics: Science and Systems 2026, 2026
CoRAL: Contact-Rich Adaptive LLM-based Control for Robotic ManipulationRSS 2026 Robotics: Science and Systems 2026, 2026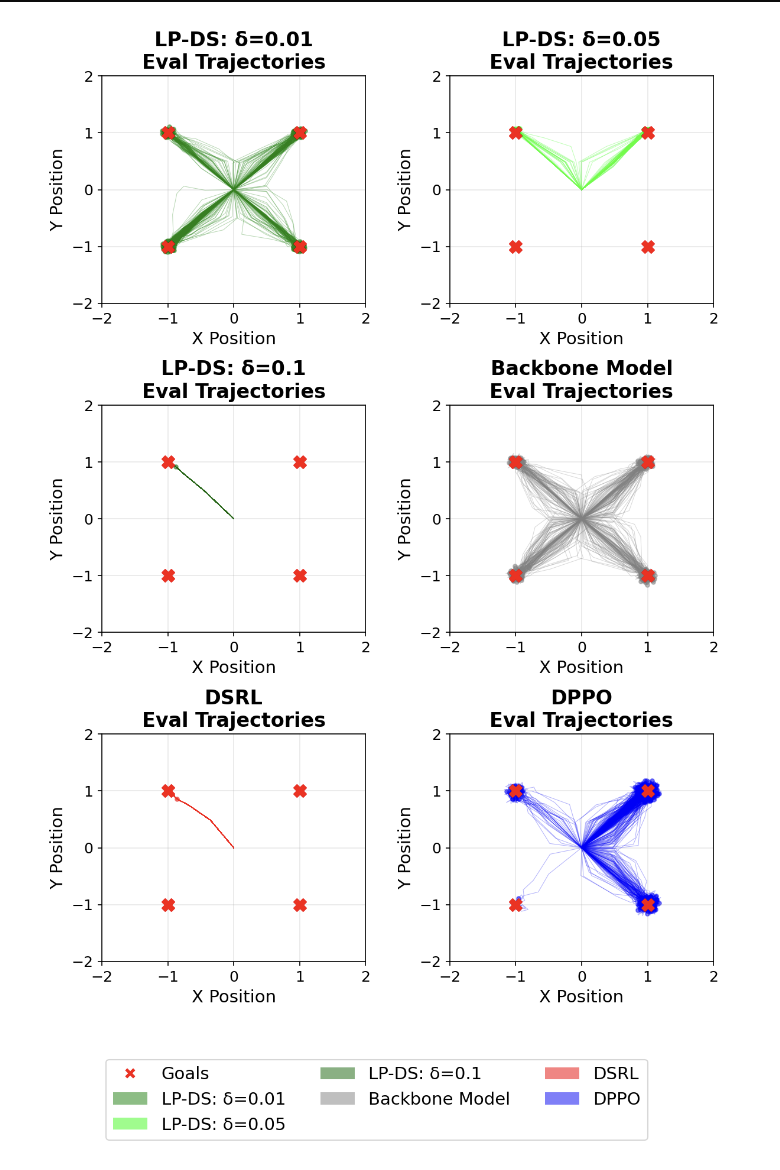 Lagrangian Perturbation Diffusion Steering: Latent Reinforcement Learning for Generative PoliciesICML 2026 Forty-Third International Conference on Machine Learning, 2026
Lagrangian Perturbation Diffusion Steering: Latent Reinforcement Learning for Generative PoliciesICML 2026 Forty-Third International Conference on Machine Learning, 2026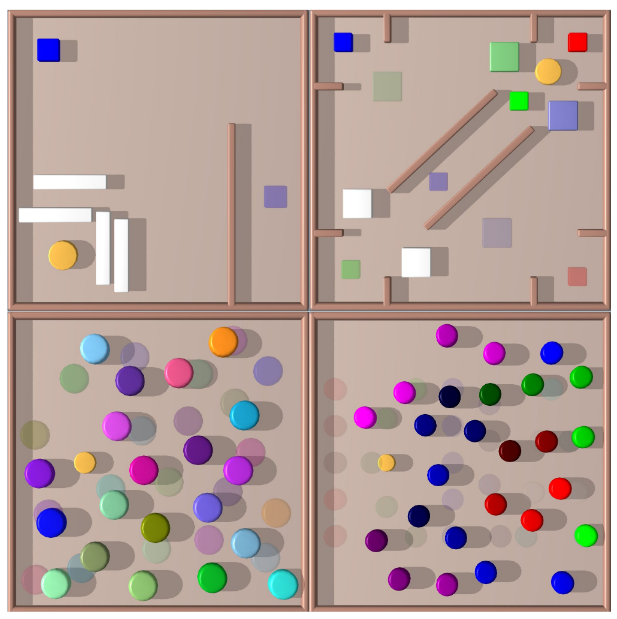 MO-SeGMan: Rearrangement Planning Framework for Multi Objective Sequential and Guided Manipulation in Constrained EnvironmentsarXiv preprint arXiv:2511.01476, 2025
MO-SeGMan: Rearrangement Planning Framework for Multi Objective Sequential and Guided Manipulation in Constrained EnvironmentsarXiv preprint arXiv:2511.01476, 2025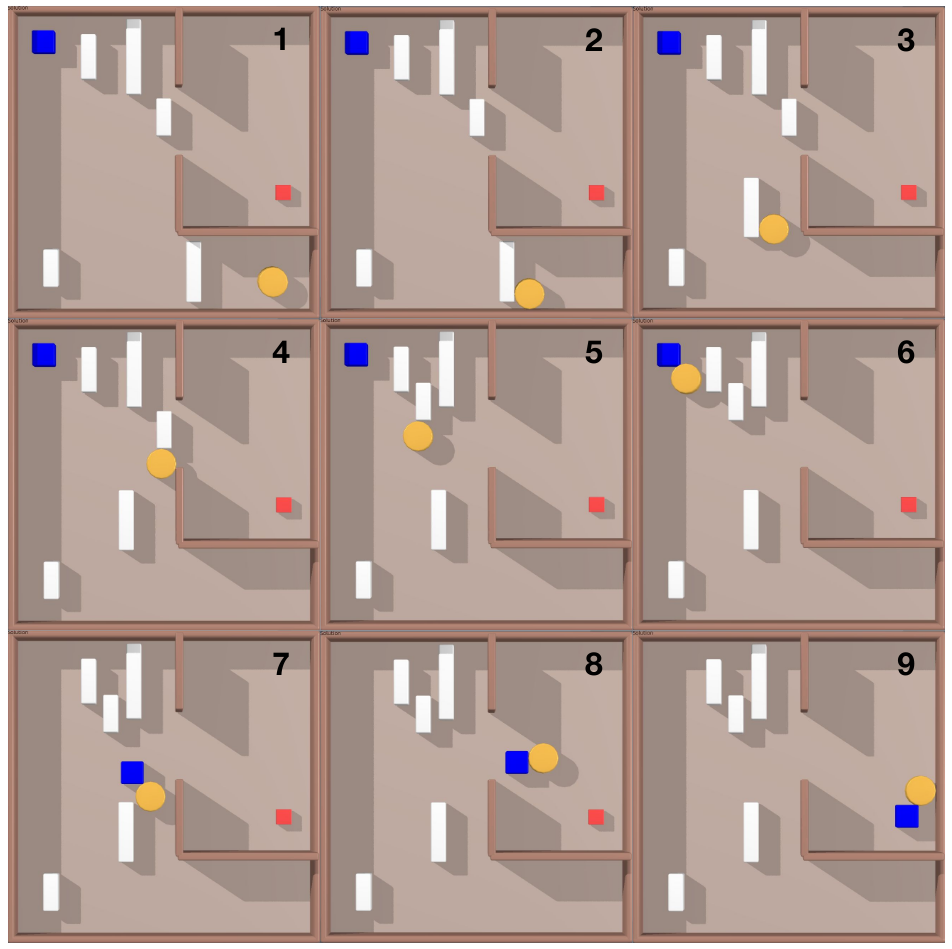 SeGMan: Sequential and Guided Manipulation Planner for Robust Planning in 2D Constrained Environments2025
SeGMan: Sequential and Guided Manipulation Planner for Robust Planning in 2D Constrained Environments2025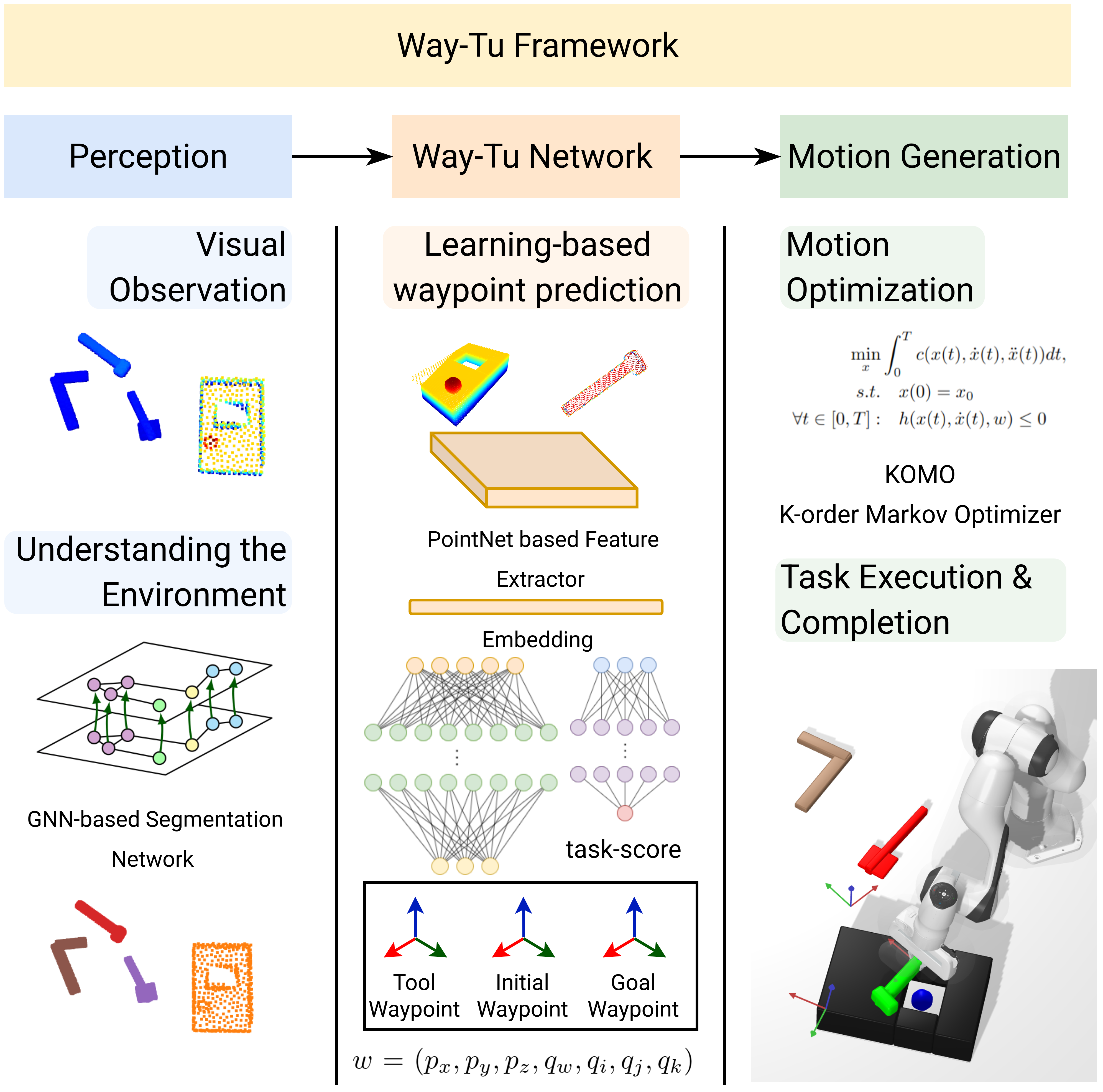 Way-Tu: A Framework for Tool Selection and Manipulation Using Waypoint RepresentationsIn Dexterous Manipulation: Learning and Control with Diverse Modalities , 2025
Way-Tu: A Framework for Tool Selection and Manipulation Using Waypoint RepresentationsIn Dexterous Manipulation: Learning and Control with Diverse Modalities , 2025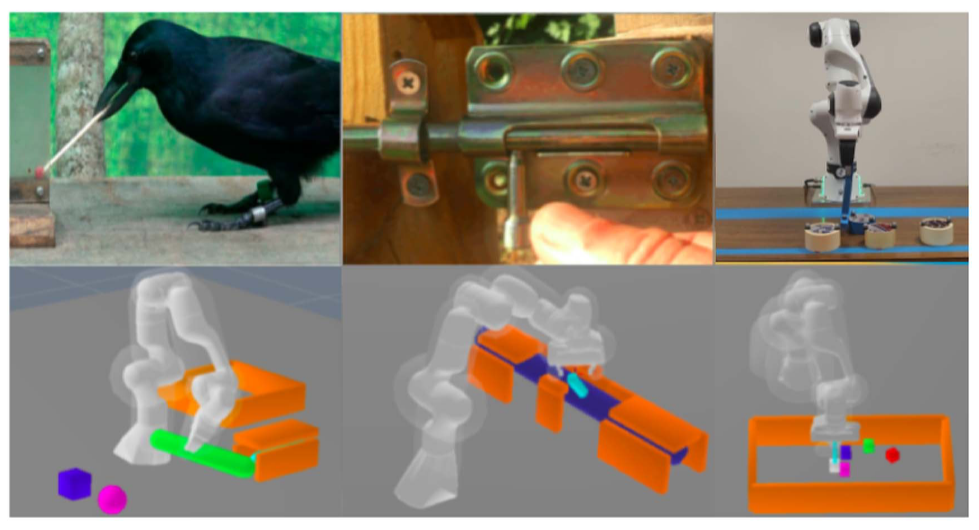 H-MaP: An Iterative and Hybrid Sequential Manipulation PlannerIEEE Robotics and Automation Letters, 2025
H-MaP: An Iterative and Hybrid Sequential Manipulation PlannerIEEE Robotics and Automation Letters, 2025





