@article{25-tuncer2025-Arxiv,title={MO-SeGMan: Rearrangement Planning Framework for Multi Objective Sequential and Guided Manipulation in Constrained Environments},author={Tuncer, Cankut Bora and Toussaint, Marc and Oguz, Ozgur S},journal={arXiv preprint arXiv:2511.01476},year={2025},}
SeGMan: Sequential and Guided Manipulation Planner for Robust Planning in 2D Constrained Environments
Cankut Bora Tuncer , Dilruba Sultan Haliloglu , and Ozgur S Oguz
@article{25-tuncer-IROS,title={SeGMan: Sequential and Guided Manipulation Planner for Robust Planning in 2D Constrained Environments},author={Tuncer, Cankut Bora and Haliloglu, Dilruba Sultan and Oguz, Ozgur S},booktitle={2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},year={2025},organization={IEEE},}
Way-Tu: A Framework for Tool Selection and Manipulation Using Waypoint Representations
Ece Kunduracioglu , and Ozgur S Oguz
In Dexterous Manipulation: Learning and Control with Diverse Modalities , 2025
@inproceedings{25-kunduracioglu-CoRLWorkshop,title={Way-Tu: A Framework for Tool Selection and Manipulation Using Waypoint Representations},year={2025},author={Kunduracioglu, Ece and Oguz, Ozgur S},booktitle={Dexterous Manipulation: Learning and Control with Diverse Modalities},}
Locally Adaptive One-Class Classifier Fusion with Dynamic lp-Norm Constraints for Robust Anomaly Detection
Sepehr Nourmohammadi , Arda Sarp Yenicesu , Shervin Rahimzadeh Arashloo , and 1 more author
@article{25-nourmohammadi-Elsevier,title={Locally Adaptive One-Class Classifier Fusion with Dynamic lp-Norm Constraints for Robust Anomaly Detection},author={Nourmohammadi, Sepehr and Yenicesu, Arda Sarp and Arashloo, Shervin Rahimzadeh and Oguz, Ozgur S},journal={Pattern Recognition},pages={112204},year={2025},publisher={Elsevier},}
H-MaP: An Iterative and Hybrid Sequential Manipulation Planner
Berk Cicek , Arda Sarp Yenicesu , Cankut Bora Tuncer , and 2 more authors
@article{25-cicek-RA-L,title={H-MaP: An Iterative and Hybrid Sequential Manipulation Planner},author={Cicek, Berk and Yenicesu, Arda Sarp and Tuncer, Cankut Bora and Demiray, Kutay and Oguz, Ozgur S},journal={IEEE Robotics and Automation Letters},year={2025},publisher={IEEE},}
2024
CUER: Corrected Uniform Experience Replay for Off-Policy Continuous Deep Reinforcement Learning Algorithms
Arda Sarp Yenicesu , Furkan B. Mutlu , Suleyman S. Kozat , and 1 more author
@misc{24-yenicesu-Arxiv,title={CUER: Corrected Uniform Experience Replay for Off-Policy Continuous Deep Reinforcement Learning Algorithms},author={Yenicesu, Arda Sarp and Mutlu, Furkan B. and Kozat, Suleyman S. and Oguz, Ozgur S.},year={2024},}
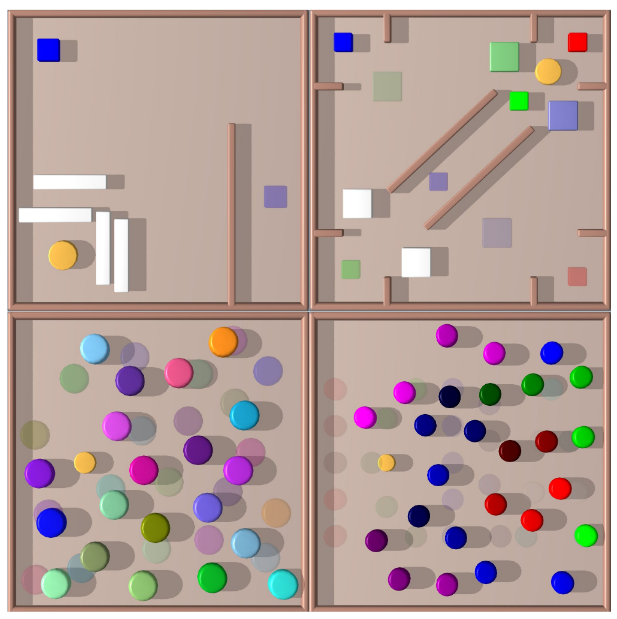 MO-SeGMan: Rearrangement Planning Framework for Multi Objective Sequential and Guided Manipulation in Constrained EnvironmentsarXiv preprint arXiv:2511.01476, 2025
MO-SeGMan: Rearrangement Planning Framework for Multi Objective Sequential and Guided Manipulation in Constrained EnvironmentsarXiv preprint arXiv:2511.01476, 2025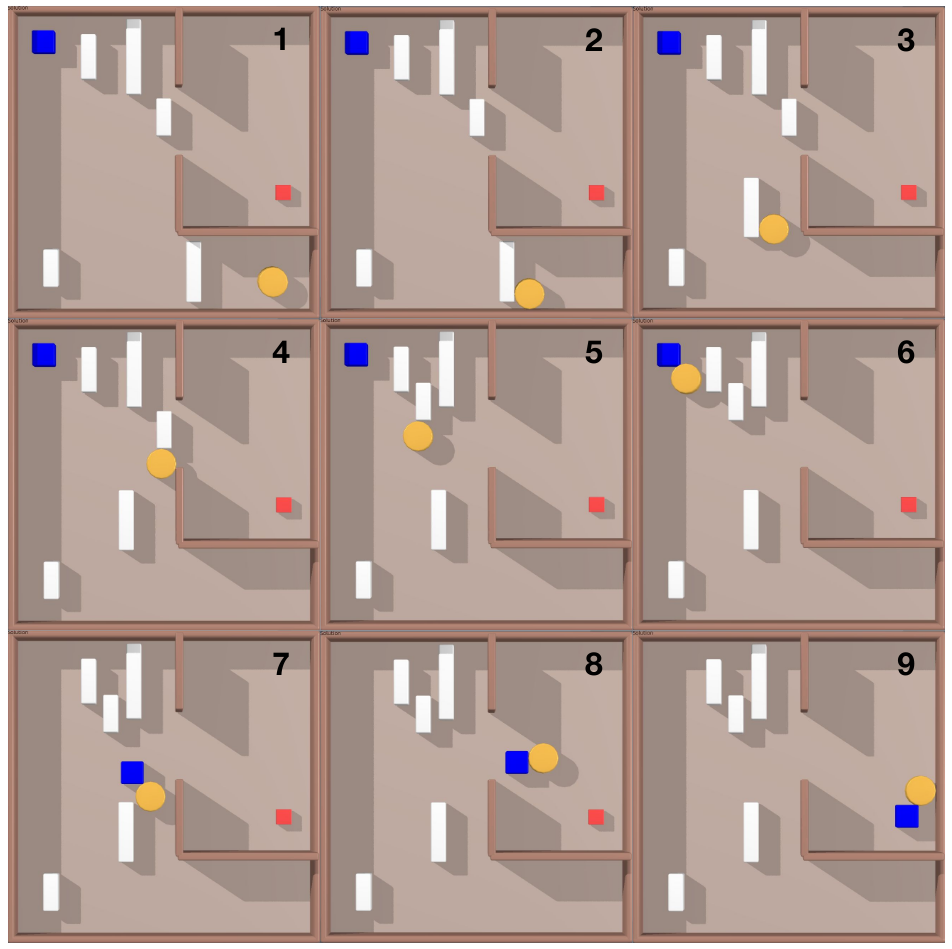 SeGMan: Sequential and Guided Manipulation Planner for Robust Planning in 2D Constrained Environments2025
SeGMan: Sequential and Guided Manipulation Planner for Robust Planning in 2D Constrained Environments2025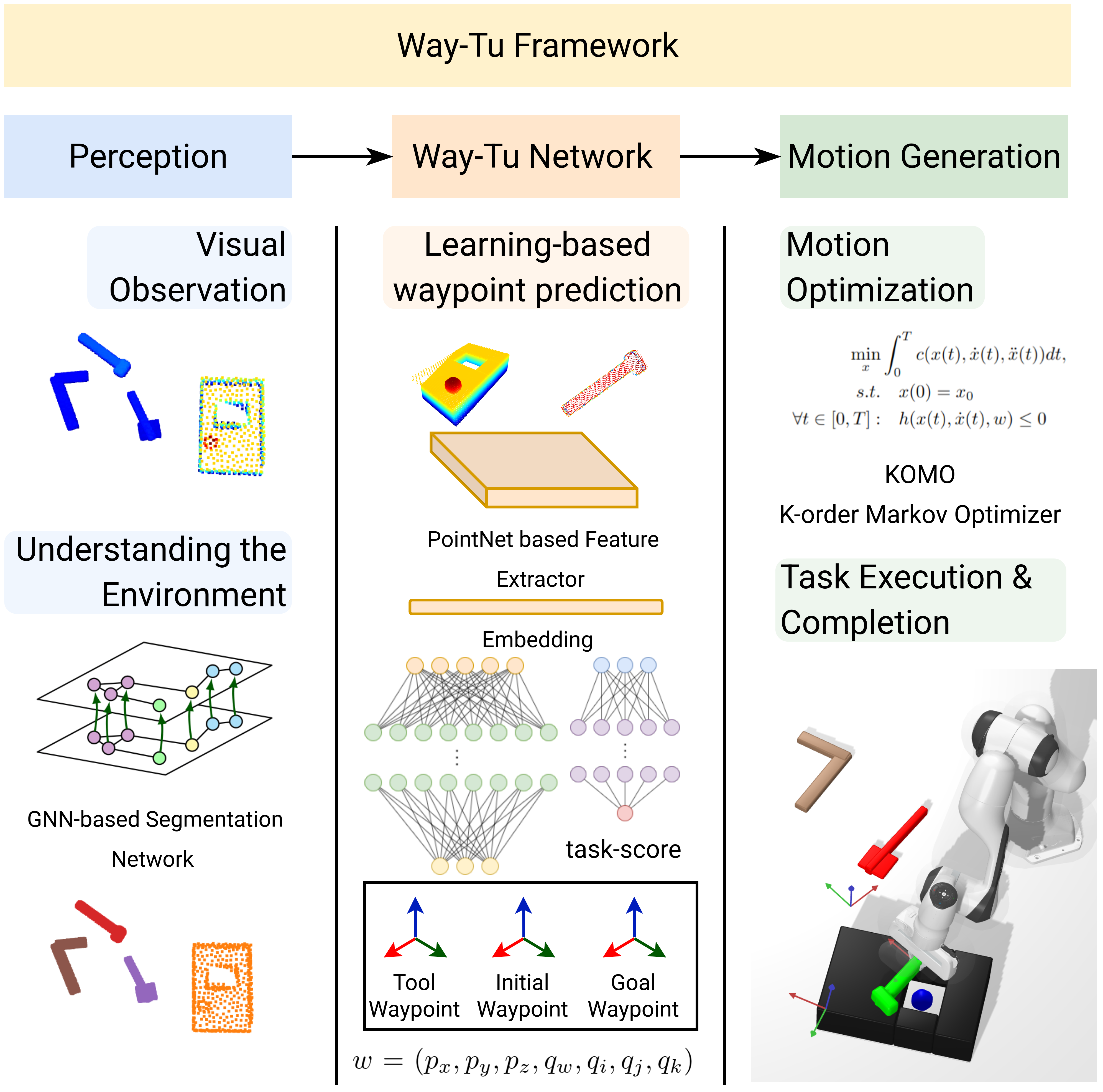 Way-Tu: A Framework for Tool Selection and Manipulation Using Waypoint RepresentationsIn Dexterous Manipulation: Learning and Control with Diverse Modalities , 2025
Way-Tu: A Framework for Tool Selection and Manipulation Using Waypoint RepresentationsIn Dexterous Manipulation: Learning and Control with Diverse Modalities , 2025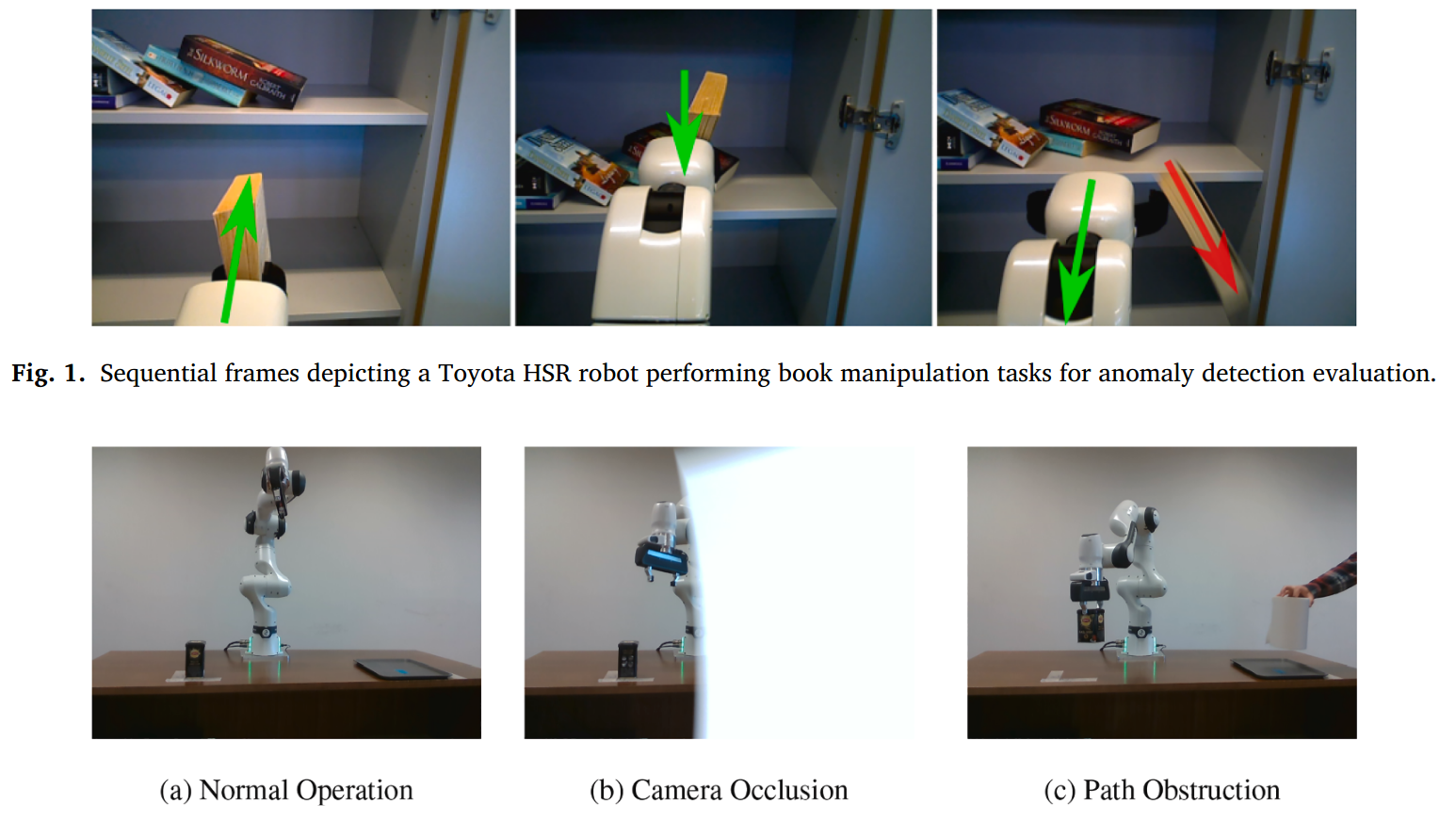 Locally Adaptive One-Class Classifier Fusion with Dynamic lp-Norm Constraints for Robust Anomaly DetectionPattern Recognition, 2025
Locally Adaptive One-Class Classifier Fusion with Dynamic lp-Norm Constraints for Robust Anomaly DetectionPattern Recognition, 2025 H-MaP: An Iterative and Hybrid Sequential Manipulation PlannerIEEE Robotics and Automation Letters, 2025
H-MaP: An Iterative and Hybrid Sequential Manipulation PlannerIEEE Robotics and Automation Letters, 2025




